【KMAPによる航空機の飛行制御設計】
●KMAPによる航空機の飛行制御設計(全般説明)
・KMAPによる航空機の飛行制御の設計および解析は,非常に簡単に行えます.それは,KMAPの
プログラムの中に,航空機の運動方程式が既に組み込まれていますので,ユーザーはフィードバック
の変数を選択して,伝達関数の基本要素を Z接続法(Z-Connection Method) という方法によりつなぐ
ことで簡単に制御系を構成することができ,直ちに安定な飛行制御系を設計することができます.
●KMAPによる航空機の制御系の構成
まず制御系をブロック図として構成することから始めます.これについては次の資料をご覧ください.
KMAPを用いると航空機の制御系は簡単に構成できます
●KMAPプログラムの起動から飛行制御系設計の準備段階まで
【ローカルディスクC:¥KMAPホルダー内に,“KMAP**実行スタートファイル.BAT”があるので,これを
ダブルクリックすると,KMAP**のプログラムが起動し次のように表示されます.】
①KMAPの起動
############## < KMAP** 解析内容選択 > ##############
(2015.*.*)
0 : 航空機,ロボット,工作機械,自動車,船および水中ビークル
の運動,制御,振動,最適化解析
(詳細は,参考図書①〜⑬ を参照下さい)
2 : 有限要素法(FEM)による構造物の弾性解析
(詳細は,参考図書⑥ を参照下さい)
3 : 差分法(FDM)による流体,熱の流れの解析
(詳細は,参考図書⑥ を参照下さい)
7 : KMAP変更内容の履歴
8 : 注意事項の表示
9 : 終了
######################################################
●何を解析しますか? 0, 2, 3, 7, 8, 9を選択 -->
【ここで,“0”をキーインすると次のように表示されます.】
②解析分野の選択
********************************************************
[1] : 航空機,ロボット,工作機械,自動車,船および水中ビークル
の運動,制御,振動,最適化解析
********************************************************
1 : 一般(下記以外) ⇒ 航空機の運動・制御系解析
2 :「CDES」 ⇒ 航空機の新規設計
3 :「CDES.WAT」 ⇒ 水中ビークルの運動・制御系解析
4 :「EIGE」 ⇒ ・基礎的な制御工学の問題
・振動工学の問題
・最適化問題
・ロボットの制御
・自動車の制御
・船の制御
・Z接続法ゲイン最適化の問題
5 :「EIGE.MEC」 ⇒ 工作機械の制御解析
6 :「HAYA」 ⇒ キーインなしで航空機シミュレーション
13 : シミュレーションデータの保存と加工
(-1): (戻る)
********************************************************
(飛行機設計なら2を入力)
●上記の解析内容 1〜 を選択 -->
【ここで,“2”をキーインすると次のように表示されます.】
③飛行機設計のメニュー選択
****************< どんな飛行機を設計しますか? >*************
通常機 (燃料重量が変化)
11 : 新規設計
または 既存機で自重一定で航続距離指定
(“自重の取り扱い”にて指定する)
13 : 飛行性能計算 (既存機体について単に飛行性能計算)
(含む,飛行特性解析,シミュレーション,
制御系安定解析,空力係数推算)
重量が一定 (電池式や人力飛行機など)
21 : 飛行性能計算 (機体形状を決めて単に飛行性能計算)
(-1): (戻る)
==========================================================
pdf資料(表示)
101 : KMAPの関数(一覧表)
102 : KMAPの関数(説明書)
103 : (飛行機形状データの説明書)
104 : (機体データEや一般的注意事項など)
**********************************************************
(不明時は11を入力)
●上記の 11〜 を選択 -->
【ここで,“13”をキーインすると次のように表示されます.】
④機体規模のメニュー選択
*******************< 機体の大きさについて >****************
乗客数 : 番号 : 内 容
----------------:------:-----------------------------------
〜 10人 : 1 : 4人乗り軽飛行機
: 2 : 10人乗り軽飛行機
----------------:------:-----------------------------------
: 3 : CRJ200 タイプ
11人〜 50人 : 4 : 主翼プロペラ2発例
: 5 : 機首プロペラ機例
----------------:------:-----------------------------------
: 6 : CRJ700 タイプ
51人〜100人 : 7 : E-170 タイプ
: 8 : E-170 タイプ(姿勢保持)
: 9 : E-190 タイプ
----------------:------:-----------------------------------
: 10 : B717-200 タイプ
101人〜150人 : 11 : B737-700 タイプ
: 12 : A320-200 タイプ
----------------:------:-----------------------------------
151人〜200人 : 13 : B737-800 タイプ
----------------:------:-----------------------------------
: 14 : B787-8 タイプ
201人〜300人 : 15 : B767-300 タイプ
: 16 : A330-300 タイプ
----------------:------:-----------------------------------
301人〜400人 : 17 : A340-600 タイプ
: 18 : B777-200 タイプ(制御なし)
: 19 : B777-200 タイプ(姿勢保持)
: 20 : B777-200 タイプ(姿勢保持,垂直離陸)
: 21 : B777-200 タイプ(姿勢保持,ホバリング飛行)
----------------:------:-----------------------------------
401人〜500人 : 22 : B747-8IC タイプ
: 23 : 胴体尾翼エンジン3発例
----------------:------:-----------------------------------
500人〜 : 24 : B747-400 タイプ
: 25 : A380-800 タイプ
----------------:------:-----------------------------------
特殊な機体 : 31 : 水平尾翼のない機体
: 32 : 先尾翼機
: 33 : 横操縦にフラッペロンを用いた機体
================:======:===================================
: 97 : 既存のファイルでそのまま解析実行
: 98 : 既存のファイルをコピー利用して新規作成
その他 : 99 : 例題ファイル(下記にリスト表示される)を
: コピー利用して新規作成
: -1 : (戻る)
==========================================================
pdf資料(表示)
101 : KMAPの関数(一覧表)
102 : KMAPの関数(説明書)
103 : 飛行機形状データの説明書
104 : 機体データEや一般的注意事項など
**********************************************************
(不明時は18を入力)
---------------------------------------
【初学者への使い方説明】
・ユーザがインプットデータを最初から作っていくのはミスが入りやすい
と思いますので,例題をコピーしてそれを修正しながら作っていくのこ
とをお勧めします.
・例題を利用する場合,次の2つの方法があります.
⇒①例題ファイルからコピー利用(=99)する方法.これまでKMAP設計
関連の参考書に掲載している例題が全て利用可能です.
⇒②上記表から,想定している乗客数に近い機体,または同タイプ
の機体をコピー利用(=1〜33)する方法.
・作成済みのインプットデータを用いる場合,次の2つの方法があります.
⇒①作成済みファイルでそのまま利用(=97)する方法
⇒②作成済みファイルをコピーして利用(=98)する方法
---------------------------------------
●上記の番号 1〜 を選択 -->
【ここでは,既に機体形状の設定が完了しているインプットデータファイルが作成済み
として“97”とキーインするとそのファイルを選択することができます.ファイルを
選択すると,次のように表示されます.】
⑥機体形状データを使うかどうかの選択
*******************************************************************
<< 機体形状データを使うか,読み飛ばすかの設定を変更しますか? >>
(機体形状が確定した後,制御則の設計解析を重点的に行う場合や,)
(空力係数をユーザが修正する場合は“読み飛ばす”を選択する. )
現在の設定:(形状データを使う)
□□□□□□□□□□□□
(ユーザが修正したデータは消えますのでご注意ください.)
設定を変更しますか? ⇒No(=0), Yes(=1)
*******************************************************************
(不明時は0入力)
---------------------------------------
【初学者への使い方説明】
・この機体形状データを使うかどうかを設定する理由を以下に説明します.
通常は,インプットデータに記述された機体形状データを用いて空力係数
などが推算され,その結果がインプットデータに反映されますが,
ユーザが別途推算したデータをインプットデータに入れて用いることも
可能です.ところが,再度解析をすると形状データから空力係数などが
推算されるため,ユーザが入れたデータが上書きされてしまいます.
そこで,機体データを読み飛ばす機能を設定しておくとユーザデータが
上書きされることを防止することができます.
---------------------------------------
----(INPUT)---- 変更 =
【ここでは,機体形状データは使うとして“0”をキーインすると次のように表示されます.】
⑦例題データの機体形状を修正
========================( 機体形状概略設定 )==============================
51 = 主翼のアスペクト比(面積一定) 52 = 主翼面積(アスペクト比一定)
53 = 主翼面積(翼幅一定)
61 = 水平尾翼のアスペクト比(面積一定) 62 = 水平尾翼面積(アスペクト比一定)
63 = 水平尾翼面積(翼幅一定)
71 = 垂直尾翼のアスペクト比(面積一定) 72 = 垂直尾翼面積(アスペクト比一定)
73 = 垂直尾翼面積(翼幅一定)
81 = 胴体を長く 82 = 胴体を太く
=======================================================================
(形状確認は,エクセル図“KMAP(機体図)*.xls”にてデータ更新してください.)
●上記修正(番号キーイン), 細部データ設定へ(=98), 形状確認(=99), 形状確定(=0)
(不明時は0入力)
---------------------------------------
【初学者への使い方説明】
・飛行機を新規設計する場合は,まず機体の形状を決める必要があります.
・使用中のインプットデータの機体形状は“99”で確認すことができます.
・現形状を修正する場合は,上記番号による“機体形状概略設定”による方法と,
“98”による細部データ設定による方法があります.
・形状を変更した場合は“99”にて形状確認ができます.
・形状が確定したら“0”をキーインしてください.
---------------------------------------
【ここでは,既に機体形状データは反映済みとして“0”をキーインすると次のように表示されます.】
⑧縦静安定量の指定
************************************************
重心最後方の縦静安定量を下記から指定してください
(脚位置,重心許容範囲を計算します)
0 : 縦静安定 5%MAC, CAP(CAT C=0.16)考慮
1 : 縦静安定 5%MAC, CAP考慮しない
2 : 縦静安定 M %MAC, CAP(CAT C=0.16)考慮
3 : 縦静安定 M %MAC, CAP考慮しない
(Mを入力)
************************************************
(不明時は0入力)
---------------------------------------
【初学者への使い方説明】
・縦静安定とは,迎角が増加した際に自然と元の迎角に戻す性質です.
・その原理は,迎角が増加したときに発生する揚力の作用点(空力中心)よりも
重心が前方にあるとき機首下げのモーメントが生じることによります.
・縦静安定5%MACとは,平均翼弦の5%だけ重心が前にあることを表し,この
量をスタティックマージンといいます.
・一方,CAP(control anticipation parameter)は運動安定余裕(マニューバ
マージン)に比例した量で重心後方限界の1つです.CAPは胴体が長いと影響
が大きくなり重心後方限界が厳しくなりますが,まずは“0”を選択ください.
---------------------------------------
【ここでは,縦静安定量(スタティックマージンテック)は5%として,“0”とキーインします.】
次に,飛行性能解析の条件(次の5つ)を設定します.
(ア) 乗員・乗客数
(イ) ペイロード
(ウ) 巡航の飛行条件
(エ) エンジンの燃費
(オ) 最大揚力係数計算用のフラップ角
【具体的には,次の表で修正したい項目を番号をキーインして行います.】
⑨飛行性能要求値の設定
****************<< 4.1 性能要求値の設定(M≦0.85) >>*****************
1 乗員・乗客数 (1名100kgfと仮定) Npassen = 0.40000E+03 (名)
2 ペイロード(除く乗客) Wpay = 0.84884E+01 (tf)
4 巡航時の高度 Hp = 0.35000E+05 (ft)
5 巡航マッハ数 M = 0.84000E+00 (−)
(等価速度VKEAS= 0.26955E+03 (kt) 真速度Vtrue= 0.24909E+03 (m/s))
7 巡航時推力1kgfあたりの燃料消費率 bJ = 0.56000E+00 (kgf/hr)
11 CLmaxTO計算用のフラップ角 δfmaxTO = 0.10000E+02 (deg)
12 CLmaxLD計算用のフラップ角 δfmaxLD = 0.50000E+02 (deg)
*****************************************************************
(ここで,性能要求の細部を指定してください.)
●何を修正しますか? (番号キーイン), 修正なし(完了)=0
【ここでは,変更なしとして“0”とキーインします.その結果,次のように表示されます.】
⑩離陸重量,自重,燃料量,離陸推力などの設定
***********<< 4.2 空力推算用機体諸元データの設定 >>**************
(A.1) 離着陸検討用データ
1 CLmax計算用高度 Hp = 0.15000E+01 (1000ft)
3 CLmax計算用速度 VKEAS = 0.16500E+03 (kt)
4 離陸重量 Wto = 0.24700E+03 (tf)
5 自重 Wemp = 0.10725E+03 (tf)
6 燃料量 Fuel = 0.11700E+03 (キロリットル)
7 離陸推力 Tto = 0.70000E+02 (tf)
8 フラップ型式 (=9--> CLmax読込み) NFTYPE = 1 (−)
( NFTYPE=0--> なし, NFTYPE=1--> best 2-slot )
( NFTYPE=2--> 1-slot, NFTYPE=3--> plane )
*****************************************************************
●何を修正しますか? (番号キーイン), 修正なし(完了)=0
(不明時は0入力)(この値を用いて解析します)(-1で前に戻ります)
---------------------------------------
【初学者への使い方説明】
・離陸重量(=4): 離陸重量を増やすとペイロード(除く乗客)が増える. 離陸重量
を減らすとペイロード(除く乗客)が減り,次に燃料量が減る.
・自重(=5): 次の2つのケースが選択できます.
①統計値を増減したデータで自重を新に設定する.
②自重を直接入力する. ⇒ 自重を増やすとペイロード(除く乗客)が減り,
次に燃料量が減る. 自重を減らすとペイロード(除く乗客)が増える.
・燃料量(=6): 次の2つのケースが選択できます.
①離陸重量一定の場合 ⇒ 燃料量を増やすとペイロード(除く乗客)が減り,
次に燃料量が制限される. 燃料量を減らすとペイロード(除く乗客)が増える.
②離陸重量が変化する場合 ⇒ 燃料量を増減すると単に離陸重量が増減する.
---------------------------------------
【ここでは,修正はなしとして“0”とキーインします.その結果,
次のように表示されます.】
⑪インプットデータの修正(前半部)
*************<< インプットデータ修正)(前半部) >>***************
1 = 機体重量 : W = 0.1610E+06 (kgf) (←着陸重量です)
(重量,慣性モーメントをインプットデータの値に戻すには“18”をキーイン)
2 = 重心 : CG = 0.2500E+02 (%)
3 = 慣性モーメント : 重量,スパンおよび胴体長による推定値です)
(慣性モーメントを入力する場合は“3”をキーイン)
4 = 翼面積 : S = 0.4280E+03 (m2)
5 = スパンの修正: b = 0.6090E+02 (m)
および エルロン,ラダーを直接力,直接モーメントの舵面にするかの選択
6 = 平均翼弦 : CBAR= 0.7950E+01 (m)
および エレベータを直接力,直接モーメントの舵面にするかの選択
7 = 計算時間(tmax≧40秒(航空機),≧4秒(EIGE解析))
8 = センサー位置
9 = エンジンジャイロモーメント,エンジン推力線角度
10 = uガスト(外乱)入力
11 = vガスト(外乱)入力
12 = wガスト(外乱)入力
13 = 外力入力
14 = パラシュートデータ
15 = 滑走路位置: Latitude = 0.3514D+02 Longitude = 0.1370D+03
Yaw = 0.0000E+00 (deg)
16 = データ名(インプットデータの1行目)
17 = 飛行方式 (垂直離陸,ホバリングなど) の設定
18 = 重量,慣性モーメントをインプットデータの値に戻す
19 = デバッグ時間(運動方程式)
**********************************************************
●何を修正しますか? (番号キーイン), 修正なし(完了)=0
【ここでは,修正はなしとして“0”とキーインします.その結果,次のように表示されます.】
⑫インプットデータの修正(後半部)
*****************<< インプットデータ修正)(後半部) >>*************************
1 = 制御則
(・制御ブロック図における各ブロックの入出力関係をインプットデータに記述 )
(・Z接続法ゲイン最適化を行う場合は“1”を選択してください.)
2 = 初期飛行条件 (高度,速度,G), 脚UP/DN, トリム計算
3 = パイロット操舵
(・U1〜U5を時間の折れ線関数として設定して利用できる )
4 = デバッグ時間(制御則部)
(・シミュレーション時に各状態変数を0.1秒毎に表示する開始時間 )
5 = 空力(MACH関数)
6 = 空力(MACH,ALP関数)
7 = 空力(MACH,Hp関数)
8 = 補間関数のデータ作成・修正
(・補間関数を利用するには,制御則修正(行追加)にて関数F48で設定)
9 = トリムをフラップで行う場合は ⇒“9”を選択!
(・水平尾翼なしの場合は自動的にフラップでトリムするので不要)
参考(①Z500, X50, H500, U40, R40, E80, D4 まで可能. 制御則は900行まで可能.)
(②変数Zは,リミッタ関数以外は2回以上定義しないこと. )
(③舵角Z1=δe, Z2=δa, Z3=δf, Z4=δr, Z5=δT. 同様にパイロット入力はU1〜U5.)
(④x,y,z外力(kgf)をZ6,Z7,Z8で追加. x,y,zモーメント(kgf・m)をZ9,Z10,Z11で追加. )
(⑤シミュレーション時のガストug,vg,wg(kt)はH491,H492,H493に定義した分も反映される.)
***********************************************************************
●何を修正しますか? (番号キーイン), 修正なし(完了)=0
【ここで,制御則をするので"1”とキーインします.これによって,制御則が
表示されます.これで飛行制御系設計の準備が完了です.】
●さて,ここから飛行制御系の設計の説明をします
【次の例題で具体的に説明します.】
【例題1】航空機のラダー系の安定化制御

図1 航空機のラダー制御系ブロック図
●まずはブロック図を描く
最初に図1に示すようなブロック図(制御系を構成する要素を四角な箱で表し線でつなげた図)を描きます.
この図の中の「航空機の運動方程式」については,既にKMAP内に設定されていますので,ユーザーは出力
変数を直接利用できます.この航空機の出力変数は,既に次のようにZ番号が設定されています.
Z21 = u(m/s) :機首方向速度 Z25 = β(deg) :横滑り角
Z22 = α(deg) :迎角 Z26 = p (deg/s):ロール角速度
Z23 = q (deg/s):ピッチ角速度 Z27 = r (deg/s):ヨー角速度
Z24 = θ(deg) :ピッチ角 Z28 = φ(deg) :ロール角
●図1のブロック図に対応する制御則をインプットデータに記述する
パイロット入力は次のようにU番号が設定されています.
U1 = エレベータ入力
U2 = エルロン入力
U3 = フラップ入力
U4 = ラダー入力
U5 = エンジン推力入力
図1の場合は,ラダー入力U4をZ90につなぐ必要があります.いま制御則のラダー系の部分は次のように
なっています.
============================================================================
85 H 0 0.2000E+02 85 0 0 0 0 0
86 //(Z2が舵角Daに接続される)
87 //
88 //****************************
89 //...<Dr系,ここから記述>....
----------------------------------------------------------------------------
行追加=1, 行削除=2, 行移動=3, 別範囲表示=4, 行コピー挿入=5
ゲイン変更=6, ジャンプ先文番号変更=7, Z等の番号変更=8, 修正完了=9
============================================================================
【ここで,行追加“1”をキーインすると,次のように表示されます.】
=============================================================================
追加行を指定して下さい(その行の後に追加)=?
=============================================================================
【ここで,89行目の後に追加するので“89”をキーインすると,次のように表示されます.】
=============================================================================
<Z,Uの加減算> <一般データHの演算> <フィルタ演算>
F33 Z1=Z2+U3; F11 H1=G; F109 積分(h≧G)
F34 Z1=Z2-U3; F12 H1=Z1; F110 積分(t≧G)
F35 Z1=Z2+Z3; F13 H1=E2; F118 積分(t≧H)
F36 Z1=Z2-Z3; F17 H1=H2*G; F119 (S+G1)/S (t≧G2)
F37 Z1=-Z2-Z3; F21 H1=H2+H3; F120 (S+H1)/S (t≧H2)
F38 Z1=-Z2+Z3; F22 H1=H2-H3; F111 1次遅れ(T=G)
F23 H1=H2*H3; F115 1次遅れ(T=H)
<Z,UのG倍> F24 H1=H2/H3; F112 ハイパス(T=G)
F52 Z1=U2*G; F25 H1=G/H3; F116 ハイパス(T=H)
F53 Z1=Z2*G; F113 リードラグ(T=G)
<Zのリミット値> F117 リードラグ(T=H)
<HをZに設定> F83 Z1={<=G}; F121 2次遅れ(ζ,ω=G1,G2)
F54 Z1=H2; F84 Z1={>=G}; F125 2次遅れ(ζ,ω=H1,H2)
F85 Z1={G1<=,<=G2}; F122 (s+G3)/2次(ζ,ω=G1,G2)
<Z,H,Eの乗除算> F126 (s+H3)/2次(ζ,ω=H1,H2)
F74 Z1=Z2*H3; <安定性ゲイン変動指定> F123 ノッチフィルタ(ζ,ω=G)
F75 Z1=Z2/H3; F301 Z1={RGAIN(De)}Z2; F127 ノッチフィルタ(ζ,ω=H)
F76 Z1=Z2*E3; F302 Z1={RGAIN(Da)}Z2; F124 レート制限2次遅れ(ζ,ω=G)
F77 Z1=Z2/E3; F303 Z1={RGAIN(Df)}Z2; F128 レート制限2次遅れ(ζ,ω=H)
F304 Z1={RGAIN(Dr)}Z2; F114 時間遅れ(T=G)
<時間tのZの値> F305 Z1={RGAIN(DT)}Z2;
F82 Z1={t=G}Z2; <安定解析用応答Rの設定>
(注) 時間t(s)はE68に設定済み. F101 R1=Z2;
----(Q4:使用済みZ,D,H,R番号)----
(Zi)i= 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
(Zi)i= 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30
(Zi)i= 40 70 72 90 91 92 93
(Di)i=
(Hi)i=
(Ri)i= 1 2 3 4 5 6 7 8 9 10 21 22 23 24
************************************(Q4)*************************************
参考(●キーイン⇒ Q1:注意事項,Q2:関数表,Q3:機体データE, Q4:使用済みZ,D,H,R番号 )
(●上記関数番号“FXXX”をキーイン, その他の関数表示は“F0”をキーイン. )
(●下記3行以外の制御則を一時的に表示するには“P”をキーイン. )
-----------------------------------------------------------------------------
85 H 0 0.2000E+02 85 0 0 0 0 0
86 //(Z2が舵角Daに接続される)
87 //
88 //****************************
89 //...<Dr系,ここから記述>....
<制御式の入力>
=============================================================================
【ここで,制御式の入力を行います.Uにある倍率をかけてそれをZにいれる
ので,上に表示されて
いる関数表の“F52”とキーインすると,次のように表示されます.】
=============================================================================
F52
Z1=U2*G;
Z番号 (-2は関数再入力)=?
=============================================================================
【ここで,Z番号は“90”,U番号は“4”,ゲインGは“1”,コメントは単にエンターキーを押すと,90行目
に次のように反映されます.】
=============================================================================
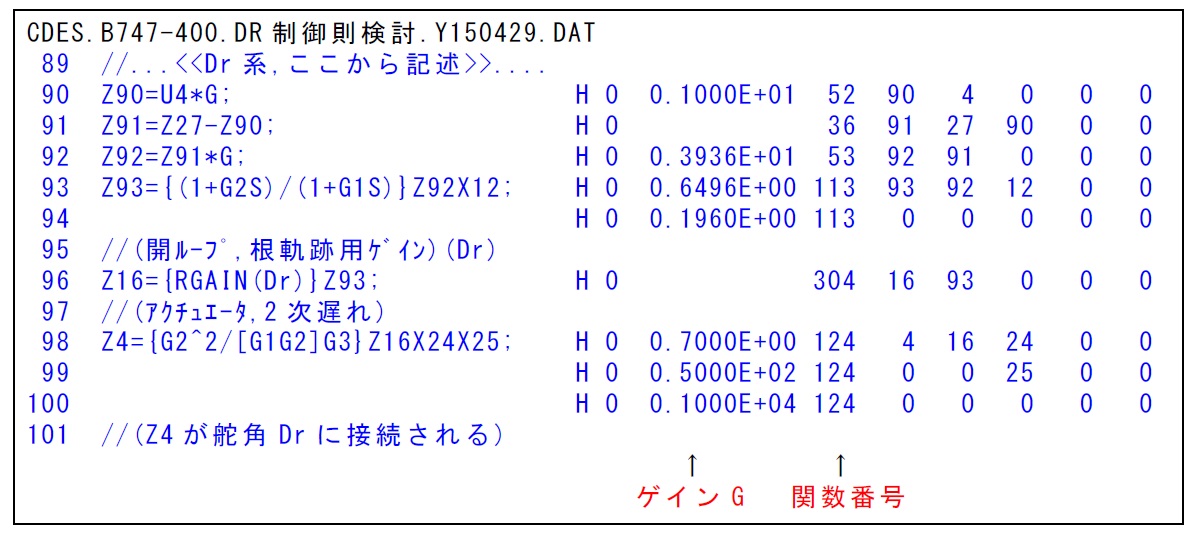
90 Z90=U4*G; H 0 0.1000E+01 52 90 4 0 0 0
=============================================================================
↑ ↑
ゲインG 関数番号
【同様に,図1の各ブロック要素を関数表からF関数番号で呼び出して,Z番号でつなげると,次に示すような
制御則インプットデータが完成します.なお,//の部分はコメント行です.】
<図1のラダー制御系に対応する制御則インプットデータ>
●Z接続法ゲイン最適化法を用いてフィードバックゲインを決定する
図1のラダー制御系について,ゲインKとリードラグ時定数T1およびT2を,Z接続法
ゲイン最適化によりシステムを安定化するように決定してみましょう.制御則データの後に,
求めるゲインが記述してある行数を定義しておきます.
このケースでは,制御則内の92, 93, 94行目が求めるゲインが記述されている行である.
この後,以下のようにキーインすることにより,最適なゲインを得ることができる.
9,1,2,0,98,0,0,4,6,0
Z接続法ゲイン最適化を実行すると,100万回のゲインの組み合わせの中から最適解を
探索します.この最適解を表示するには次のようにします.
<解析結果の表示>のページにおいて,“1”とキーインすると,安定解析図用のExcel
ファイルのメニューが表示されます.その中の“KMAP(最適ゲイン探索)1B.xls”を起動し
てデータ更新すると図2に示す安定解の存在範囲が表示できます.また,同じメニューで,
“KMAP(f特,根軌跡C)1H.xls”を起動してデータ更新すると図3に示す根軌跡が表示できます.
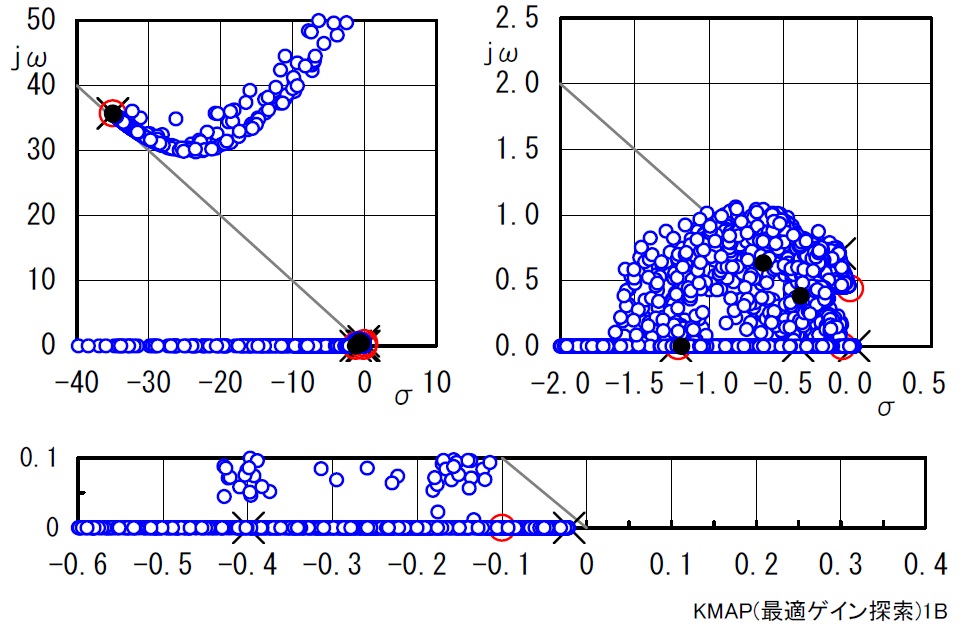
図2 安定な極の存在範囲 (CDES.B747-400.DR制御則検討.Y150429.DAT)
Z接続法ゲイン最適化によりゲインおよび時定数が次のように得られます.
==========( 最適ゲイン探索結果 )=============
( 1) 92行目 0.3936E+01 (ゲインK)
( 2) 93行目 0.6496E+00 (リードラグT1)
( 3) 94行目 0.1960E+00 (リードラグT2)
==========================================
得られたゲインを用いて,図1のRGAINを変動させて描いた根軌跡が図3です.左半面45°の
非常に安定した位置に極が移動して十分な安定余裕を持つことがわかります.
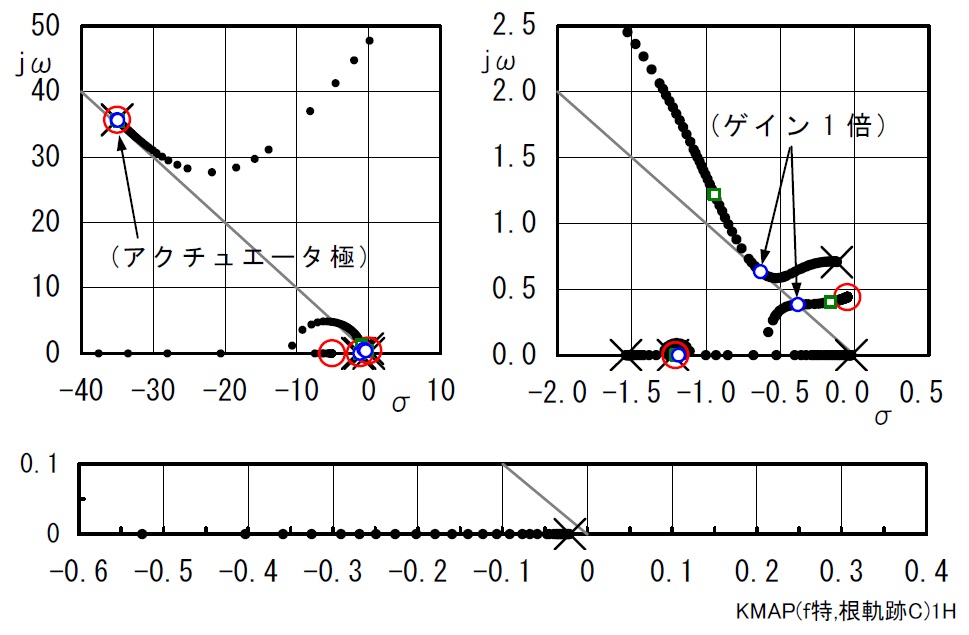
図3 Z接続法ゲイン最適化により得られた根軌跡
図3に示した根軌跡におけるノミナルゲイン(ゲイン1倍)での極・零点は,図4のようになります.
左半面45°の非常に安定した位置に極が配置されていることがわかります.
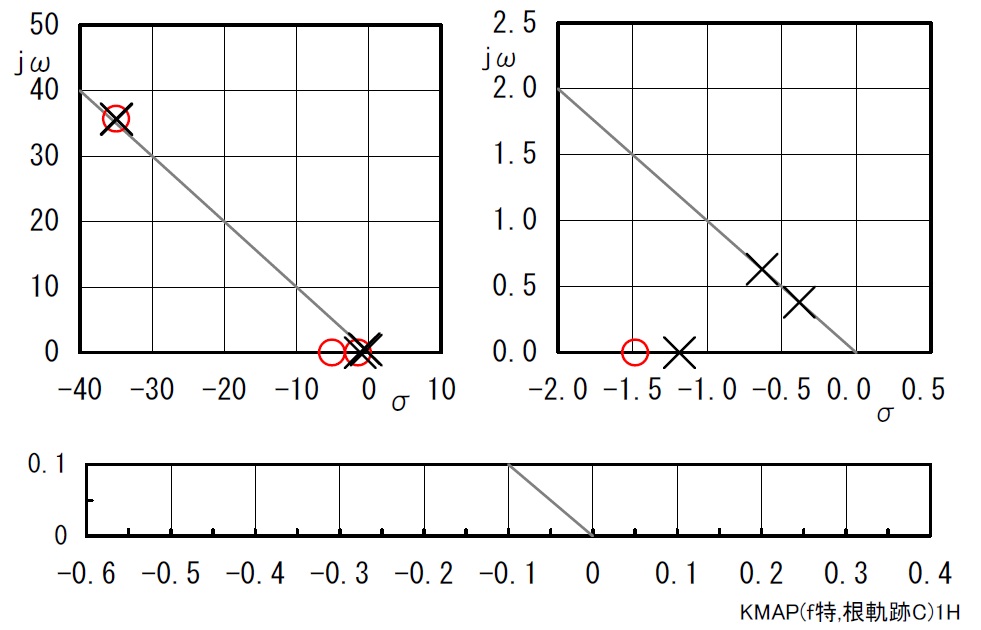
図4 Z接続法ゲイン最適化により得られた極・零点
このように,KMAPを用いたZ接続法ゲイン最適化手法により,安定な制御系が簡単に設計
できますので,ぜひ使ってみてください.
戻る
(片柳亮二)